A.I. Art BlogLook here for announcements and progress I have made on my A.I. Art projects since 2005. Archive 2025 2 2024 11 2020 3 2019 1 2018 13 2017 23 2016 37 2015 15 2014 12 2013 6 2010 2 2009 5 2008 4 2007 1 cloudpainter Pindar Van Arman 11/12/16 cloudpainter Pindar Van Arman 11/12/16 cloudpainter Hardware Complete - 2 Robotic Arms and 5 Airbrushes Read More Earlier Robots, cloudpainter Pindar Van Arman 10/19/16 Earlier Robots, cloudpainter Pindar Van Arman 10/19/16 The Early Robots Read More Earlier Robots, Neural Jet Pindar Van Arman 9/25/16 Earlier Robots, Neural Jet Pindar Van Arman 9/25/16 Ten Years of Progress on Painting Robots Read More Neural Jet, Earlier Robots Pindar Van Arman 9/18/16 Neural Jet, Earlier Robots Pindar Van Arman 9/18/16 Airbrush Actuator Complete Read More Neural Jet Pindar Van Arman 9/9/16 Neural Jet Pindar Van Arman 9/9/16 Neural Jet Modular Paint Head Complete Read More Neural Jet, Earlier Robots Pindar Van Arman 8/31/16 Neural Jet, Earlier Robots Pindar Van Arman 8/31/16 Refined Paint Head (Model R) Read More Neural Jet Pindar Van Arman 8/29/16 Neural Jet Pindar Van Arman 8/29/16 Paint Head Prototype Constructed Read More BitPaintr, Neural Jet Pindar Van Arman 1/16/16 BitPaintr, Neural Jet Pindar Van Arman 1/16/16 First Robotic Head Mock-Up and Updates Read More BitPaintr, Neural Jet Pindar Van Arman 1/11/16 BitPaintr, Neural Jet Pindar Van Arman 1/11/16 New Robot Design Finalized - Will be ready in 3-6 months... Read More Earlier Robots Pindar Van Arman 1/6/09 Earlier Robots Pindar Van Arman 1/6/09 New Painting Robotic Head with Camera and Light Read More Earlier Robots Pindar Van Arman 7/30/08 Earlier Robots Pindar Van Arman 7/30/08 New Robotic Head Installed on Painting Robot Read More
cloudpainter Pindar Van Arman 11/12/16 cloudpainter Pindar Van Arman 11/12/16 cloudpainter Hardware Complete - 2 Robotic Arms and 5 Airbrushes Read More
Earlier Robots, cloudpainter Pindar Van Arman 10/19/16 Earlier Robots, cloudpainter Pindar Van Arman 10/19/16 The Early Robots Read More
Earlier Robots, Neural Jet Pindar Van Arman 9/25/16 Earlier Robots, Neural Jet Pindar Van Arman 9/25/16 Ten Years of Progress on Painting Robots Read More
Neural Jet, Earlier Robots Pindar Van Arman 9/18/16 Neural Jet, Earlier Robots Pindar Van Arman 9/18/16 Airbrush Actuator Complete Read More
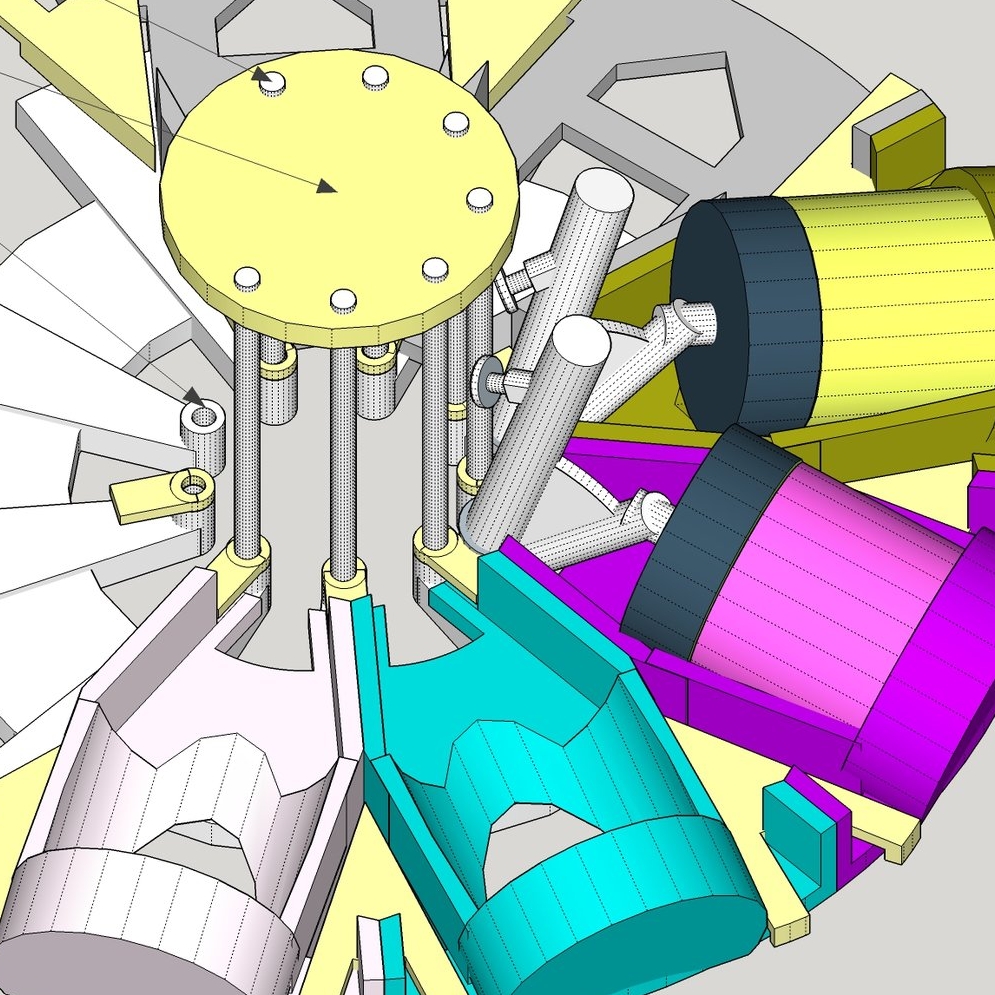
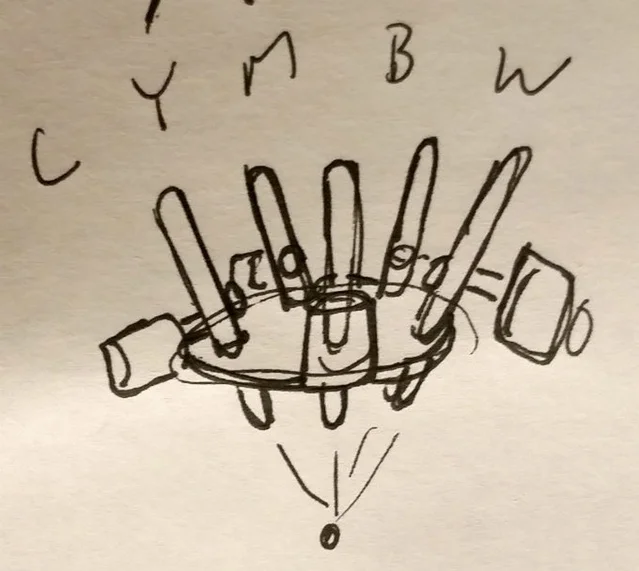
Neural Jet Pindar Van Arman 9/9/16 Neural Jet Pindar Van Arman 9/9/16 Neural Jet Modular Paint Head Complete Read More
Neural Jet, Earlier Robots Pindar Van Arman 8/31/16 Neural Jet, Earlier Robots Pindar Van Arman 8/31/16 Refined Paint Head (Model R) Read More
Neural Jet Pindar Van Arman 8/29/16 Neural Jet Pindar Van Arman 8/29/16 Paint Head Prototype Constructed Read More
BitPaintr, Neural Jet Pindar Van Arman 1/16/16 BitPaintr, Neural Jet Pindar Van Arman 1/16/16 First Robotic Head Mock-Up and Updates Read More
BitPaintr, Neural Jet Pindar Van Arman 1/11/16 BitPaintr, Neural Jet Pindar Van Arman 1/11/16 New Robot Design Finalized - Will be ready in 3-6 months... Read More
Earlier Robots Pindar Van Arman 1/6/09 Earlier Robots Pindar Van Arman 1/6/09 New Painting Robotic Head with Camera and Light Read More
Earlier Robots Pindar Van Arman 7/30/08 Earlier Robots Pindar Van Arman 7/30/08 New Robotic Head Installed on Painting Robot Read More